今回は自律移動ロボットと人間のナビゲーション能力の違いについてです。
自律移動ロボットって?
日常生活では、あまり見ることはないかもしれませんが、工場や一部の限定エリアでは、ロボットによる自動搬送が行われ始めています。
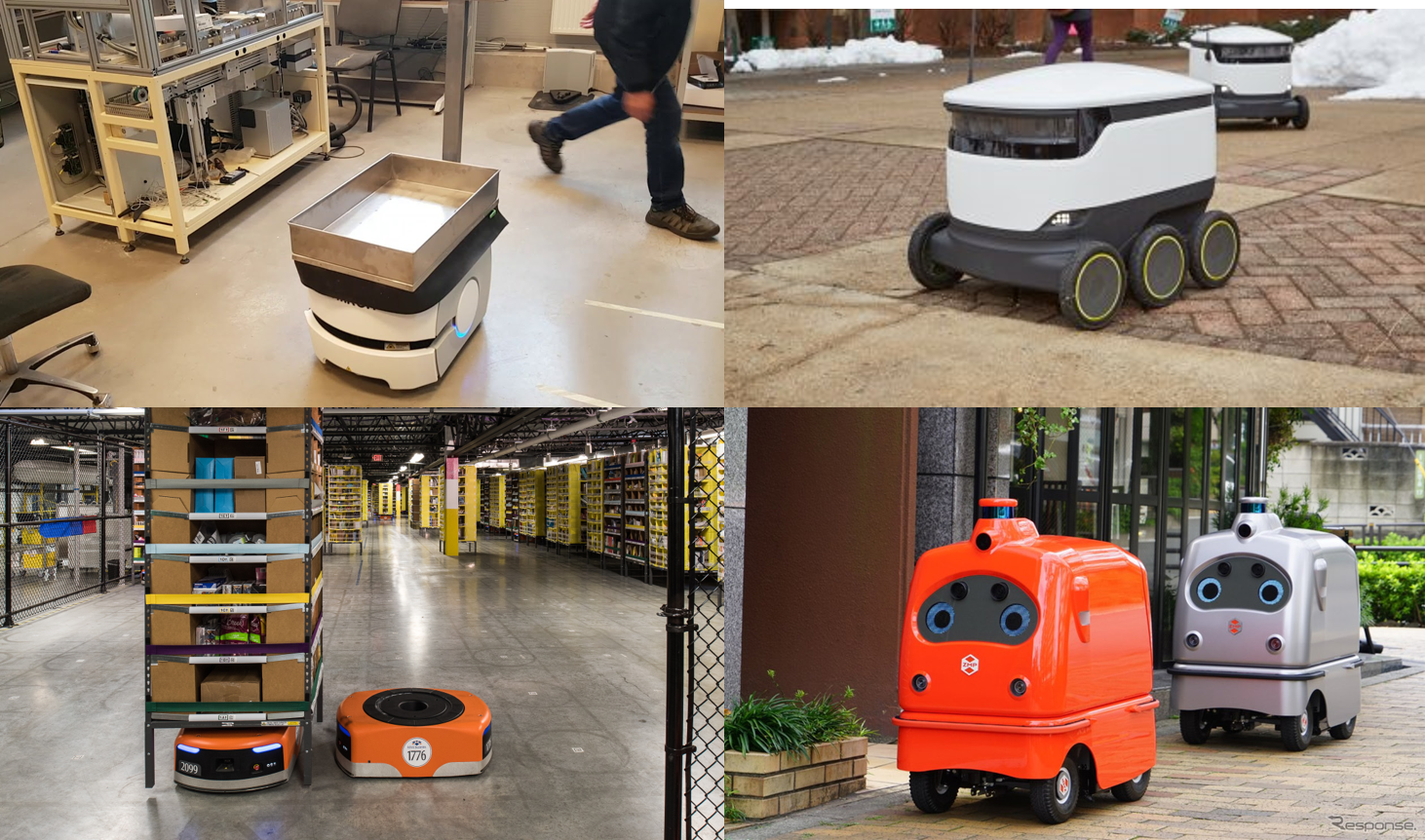
どうやって自動で目的地まで到達するかというと、
取り付けられているレーザースキャナで周囲の地図を作成し、カーナビのように自分で目的地までの経路を計画します。
具体的には、以下の3つの機能が必要になります。
①地図を持っていること
人間も現在地から目的地まで行こうと思うと、頭の中で地図を思い浮かべながら移動します。それと同じようなことをロボットも行います。
②自己位置認識ができること
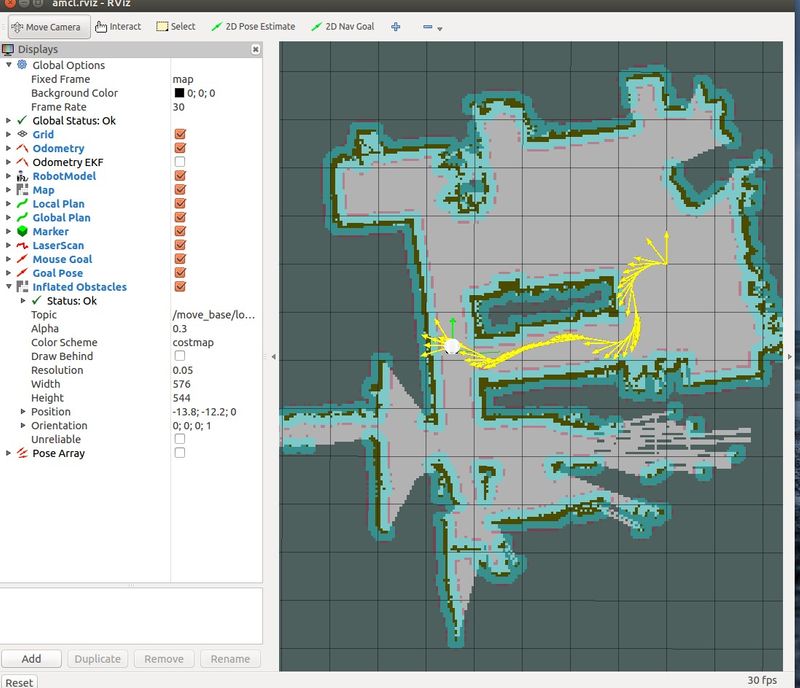
これも人間と同様です。現在位置が分かっていなければ、目的地までの経路も計画できません。人間は主に視覚情報から現在地を判断しますが、ロボットはレーザースキャナの情報を使うことが多いです。レーザースキャナとは、レーザー光を発してから壁に反射して帰ってくるまでの時間を計測することで、周囲の壁や障害物までの距離を360°把握することができます。①では詳しく言及しませんでしたが、あらかじめロボットの行動範囲全体の壁や物をスキャンしておき、それを地図として利用します。その地図と現在見えている周囲の壁をマッチングすることで、現在位置を推定します。下の図でいうと、赤い線がレーザースキャナで今見えている壁で、あらかじめ持っている地図とマッチングしています。
③経路を(計算で)計画できること
これは人間と違ってイメージしにくいかもしれません。人間は何となく目的地までの経路を考えることができますが、同じことをロボットにやらせるためには、「計算で」やる必要があります。今回は具体的な手法については省略しますが、以下の図のように、グリッド状のマップを持って置きマスが最短になるように経路を算出します。②の自己位置推定に関しては、このグリッドマップのどのピクセルにいるかを推定します。
人間の脳はどうやってナビゲーションしているか
「メカ屋のための脳科学入門」という本を参考に調べてみました。
結論から言うと、ロボットと同じようなナビゲーションである、パス ・インテグレータ仮説というものが、今のところ有力だそうです。
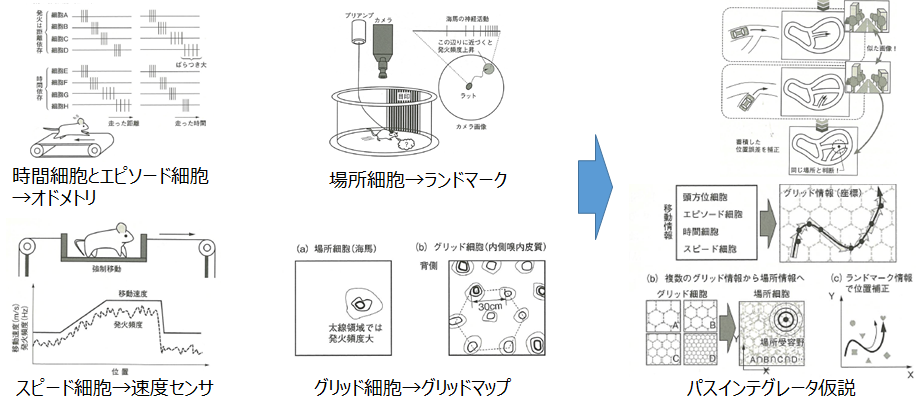
具体的には以下の図左のように、人間にはロボットがセンサーを使って得ている情報と同じようなことを行っている脳細胞が発見されています。
①グリッド細胞
ロボットでいうところのグリッドマップです。頭の中で地図を思い浮かべるというのは、まさに頭の中にグリッド細胞というマップがあるようです。
②時間細胞、エピソード細胞、スピード細胞
これは自己位置推定に関連する細胞ですが、自分自身のスピードや歩いた距離を判断する細胞です。目をつむって歩いても、乗り物に乗っていてもなんとなくどれくらい移動したかわかるのは、これらの細胞のおかげです。エピソード細胞というのは、過去のエピソードを覚えているかというものではなく、どれくらいの歩幅で歩いたかというような感覚を担っているみたいです。ロボットにおいては、タイヤが何回転したか(オドメトリ)などに相当します。
③場所細胞
これも自己位置推定に関連する細胞です。自分がどれだけ歩いたかという感覚だけでは、どんどんずれていってしまうので、見覚えのある景色から、随時自分の位置を補正します。ロボットでいうと、レーザースキャナで地図とマッチングをとるのに近いかもしれません。
余談ですが、認知症になると②の時間細胞やエピソード細胞が先に機能しなくなっていくそうです。時間の感覚がなくなってしまったり、道に迷いやすくなりますが、場所細胞は機能が残っているので、急にその景色には見覚えがあるというような状態になるそうです。
メカ屋のための脳科学入門-脳をリバースエンジニアリングする
そして、これらの情報を統合して、経路の計画を行っている「だろう」というのが、パスインテグレータ仮説です。上記の4種類の細胞はすでに存在されているのに対し、こちらはまだ証拠が見つかっていないので、まだ仮説なんだそうです。
最後に
最近のAIブームで、人のようなロボットが求められていますが、よく考えてみると人ってどうやって思考したり、行動してるんだっけ?というのがよくわかっていなければ、本当に人と協調できるロボットは作れないのかもしれません。